Mavlink LED-Signalisierung & HoTT
Auf dieser Seite präsentiere ich ein Addon, das erfordert keine Änderungen im Code AutoQuad aber ist gebaut, um die AutoQuad MAVLink Ausgabe zur Steuerung von LED-Signale und push-to-Sender Graupner HoTT Telemetrie-Daten zu verwenden.’ Der Kodex soll laufen auf eine Arduino je Prozessor, Es ist nicht wirklich wichtig, welche Art, aber ich entschied mich für die JDrones IOBoard denn es verbindet ein Arduino Pro Mini mit 6 High-power, Hochspannungs-Ausgänge direkt steuern led Streifen (0-40V). Es kann am AutoQuad FTDI-Controller angeschlossen werden, können bis zu steuern 6 LEDs und fügen Sie einen Graupner HoTT-Empfänger.
Aktueller status: (Dec 2013)
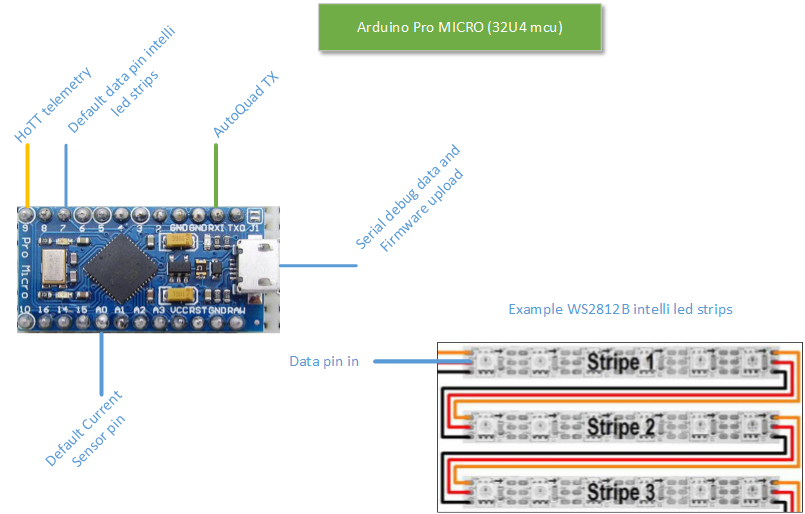
- Unterstützung für Arduino Pro MICRO (Leonardo-bootloader) und Pro MINI basierte boards
- Einsetzbar als eigenständige AutoQuad Controller geführt (auf der Grundlage von Mavlink Kommunikation), eigenständige Mavlink HoTT-Telemetrie-Brücke oder die Kombination der beiden.
- Alle AutoQuad Mavlink Daten zu entschlüsseln
- LED-Status entwaffnet, bewaffnet, Höhe halten, Position halten, Mission, Radio-Verlust, Batterie-Bühnen und Navigation-Stufen (Erweiterte Mavlink-Nachricht benötigt)
- LED-Sequenzer mit auswählbaren Mustern und Farben (mit RGB-leds).
- Unterstützung für verschiedene intelligente LED-Streifen, IE WS2811, 2812(b), LP8806 usw..
- HoTT-Daten: Akku, verbleibenden Ladestandsanzeige, AQ temp, GPS-Koordinaten, auf dem Weg nach AQ, Lager zu Hause, Distanz zu Hause, Vario (Höhe), Geschwindigkeit, GPS-status, Realtime flighttimer, tatsächlichen aktuellen und aktuelle Nutzung (verbleibende Kapazität) und vieles mehr.
- Arduino IDE 1.0 oder höher. Wählen Sie Arduino Pro Mini (5V, 16MHz) ATmega328, oder pro MICRO. Achten Sie darauf, alle Bibliotheken aus dem Download zum Verschieben der Arduino “Bibliotheken” Ordner.
- Code im Download-Bereich
Der LED-Status und der Anzeige können leicht in den Code zwar einige geändert werden (Arduino) Entwicklung-Kompetenzen sind gefragt. Nicht finden ein Upload oder Programm hier denn es gibt eine große Menge an Informationen werden auf speziellen Seiten finden. Der LED-Sequenzer ist in einer Tabelle das AutoQuad Build mit led-Sequenzer ähnlich leicht geändert..

          |
||
Das Herstellen der AutoQuad
Es ist möglich, parallel Rx-tx-Verbindungen mit dem FTDI-Port verwenden. Solange die Signale auf dem Niveau der Spannung sind, die Mcu kann damit umgehen, ohne immer geschädigt. Keine Hochstrom-sicherzustellen kann fließen, Sie könnten überlegen, einen Widerstand in beiden die tx/Rx-Linien. Mav2Hott in seiner jetzigen Form wird nur AutoQuad anhören und nicht Nachrichten senden hierfür nur die AutoQuad TX Mav2HoTT Arduino brauchte RX. Ein 2 k 2 Widerstand werden die Linien zu schützen. Wenn es einen Unterschied in der Spannung zwischen den angeschlossenen Geräten gibt (XBee 3.3V + Arduino 5V, die man von einer einfachen Diode in der TX-RX-Strecke nach dem Arduino, die Spannung zu senken. All dies sind nur Empfehlungen, Es funktioniert ohne Widerstände oder Dioden aber wird hier angegeben, um zu verhindern, dass eine Durchgebrannte AutoQuad mcu.

Hinweis: Signal Draht verweist immer auf den weißen Pfeil.
Ohne Änderungen am Code Mav2HoTT, Digitalport D5 standardmaessig HoTT-Telemetrie-Ausgabe. (D9 auf Arduino pro MICRO!) Verbinden Sie einfach 1 Draht von d5 an den Empfänger-Telemetrie-port (T). Die PPM-Verbindung mit AQ liefert die GND und schließen Sie die Schaltung.
Prüfsummen
Wenn Sie AutoQuad r200 verwenden oder später gibt es bereits kleine Änderungen im Code AutoQuads Status ausgeben. Schließen Sie einfach die Mav2HoTT-arduino, die Telemetrie-port, an den Receiver und schalten Sie alle. Bei Auswahl der Empfänger und die verschiedenen Telemetrie-Sensoren (Mav2HoTT simuliert Vario,GPS,General Air und elektrische Air) Sie sollten die Daten auf den Bildschirmen sehen.. Zur Einrichtung der Telemetrie, der richtige Anschluss am Receiver etc. kann natürlich in den Graupner-Handbüchern lesen.. Wenn die Nachricht auf dem Bildschirm Nr. Mavlink ist Sie entweder eine ältere Version von AutoQuad oder vertauscht die RX/TX-Linien. Wenn keine Daten überhaupt verfügbar ist und Sie sicher, dass der Sender ist richtig eingerichtet sind, Telemetriedaten empfangen können dann Sie die Mav2HoTT beheben indem Sie die Debugoption kompilieren. Mit Debug können Sie alle decodierte Mavlink-Daten mithilfe der d5/d6-Port und ein serielles Terminal wie Knete anzeigen.. Für das Debuggen können Sie die gleiche FTDI-Usb-Schnittstelle, die verwendet wird, blinkt AutoQuad oder der Groundstation AutoQuad herstellen. Nur die GND und d5, RX ist erforderlich. Die (PuTTY) Terminal-Einstellung muss 19200, n,8,1. Nach dem Einschalten einer kleinen Nachricht wird angezeigt. Wenn diese Meldung nicht angezeigt wird, Überprüfen Sie die Verbindungen und vielleicht tauschen Sie RX-TX auf den FTDI.
Finden Sie mehr Infos über die IOBoard in der jDrones Wiki  Aktuelle Sensor von v 0.92 ein aktuelle Sensor kann an dem Arduino Mav2HoTT befestigt werden. Alle analogen Port einsetzbar und kann in der Mav2HoTT.h-Datei konfiguriert werden (CONFIG # Abschnitt). Es muss jedoch Kalibrierung Werte den Spannung-Offset @0A wie (der Sensor sendet was bei Nichtgebrauch), die Empfindlichkeit (wie viele mV pro A), die Spannung in (zum Beispiel die 5V aus AQ). Diejenigen sollten vom Hersteller und von tatsächlichen Messungen verfügbar sein.. Sobald eingegeben und die AutoQuad bewaffnet ist sollte die HoTT-Anzeige anzeigen der aktuellen und mAh-Werte beginnen.. Am besten zu einer bekannten Leistungsmesser verwenden, um die Werte zu überprüfen. Der beste Wert ändern, wenn die HoTT Messwerte sind stimmt nicht den CURR_AMP_PER_VOLT-Wert wenn die mAh vom tatsächlichen Wert zu hoch ist, Abnahme der CURR_AMP_PER_VOLT im 1mV-Schritte, um es in niedrig zu erhöhen 1 mV-Schritten.
Aktuelle Sensor von v 0.92 ein aktuelle Sensor kann an dem Arduino Mav2HoTT befestigt werden. Alle analogen Port einsetzbar und kann in der Mav2HoTT.h-Datei konfiguriert werden (CONFIG # Abschnitt). Es muss jedoch Kalibrierung Werte den Spannung-Offset @0A wie (der Sensor sendet was bei Nichtgebrauch), die Empfindlichkeit (wie viele mV pro A), die Spannung in (zum Beispiel die 5V aus AQ). Diejenigen sollten vom Hersteller und von tatsächlichen Messungen verfügbar sein.. Sobald eingegeben und die AutoQuad bewaffnet ist sollte die HoTT-Anzeige anzeigen der aktuellen und mAh-Werte beginnen.. Am besten zu einer bekannten Leistungsmesser verwenden, um die Werte zu überprüfen. Der beste Wert ändern, wenn die HoTT Messwerte sind stimmt nicht den CURR_AMP_PER_VOLT-Wert wenn die mAh vom tatsächlichen Wert zu hoch ist, Abnahme der CURR_AMP_PER_VOLT im 1mV-Schritte, um es in niedrig zu erhöhen 1 mV-Schritten. 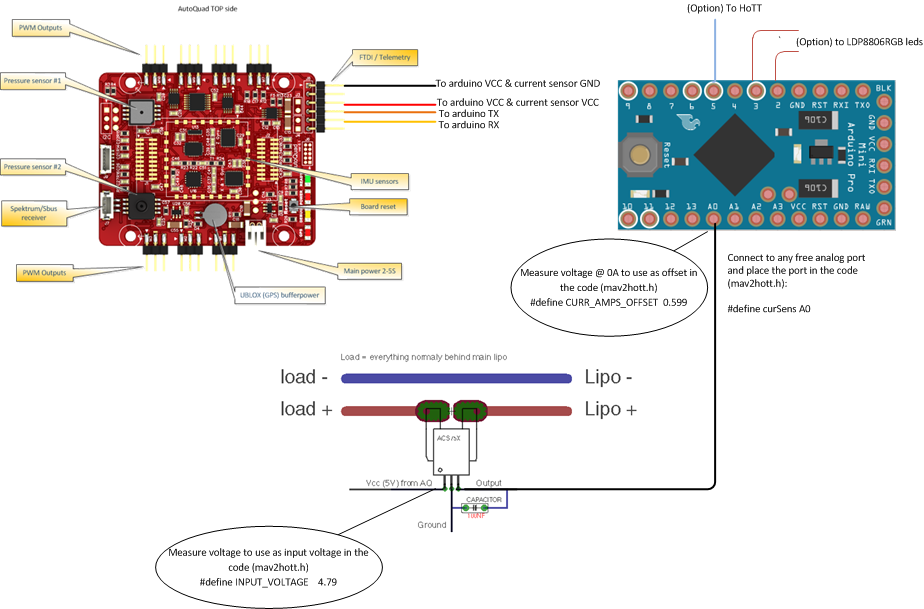
Pro MICRO Unterstützung: